Media Summary: Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... The map was created using RGBD (+depth), yet relocalization works reasonably well with only RGB. See the map created in the ... SLAM is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping ...
Orb Slam2 - Detailed Analysis & Overview
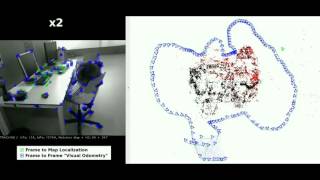
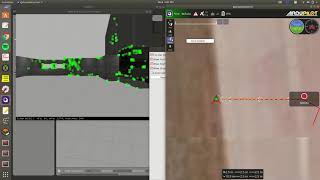
Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... The map was created using RGBD (+depth), yet relocalization works reasonably well with only RGB. See the map created in the ... SLAM is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping ... Monocular ORB-SLAM2 with a drone in Gazebo Frames captured with an iPhone in RGB and processed with a machine learned algorithm to infer depth information. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.7 Authors: Mur-Artal, Raul; Tardos, Juan D. Title:
Example of mapping a room and saving the map. After capturing, the frames were processed with a machine learned model to ... Video showing robot recording its own trajectory during a simple forward and back movement. Monocular Monocular RGB only (no depth information) used. Notice tracking is lost quickly. Not a robust mapping solution. See the following ...




![[Visual-SLAM] ORB-SLAM2 Live Demo @CSU](https://i.ytimg.com/vi/AD-tHaln8fY/mqdefault.jpg)





