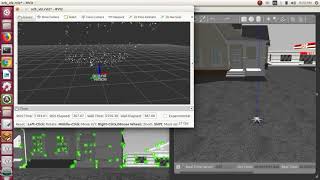
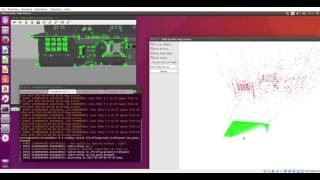
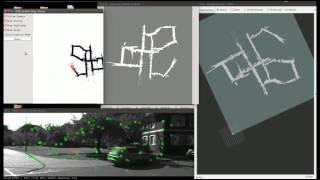
Media Summary: Having recorded a sequence at 20 fps in which there is quite much rotation per translation and a loop, I compared the ... ORB SLAM 2 with Calibrated Monocular Camera By using ORBSLAM and only monocular camera we were able to create a 2d occupancy grid map to eliminate the use of lidar to ...
Orb Slam 2 Mapping A - Detailed Analysis & Overview
Having recorded a sequence at 20 fps in which there is quite much rotation per translation and a loop, I compared the ... ORB SLAM 2 with Calibrated Monocular Camera By using ORBSLAM and only monocular camera we were able to create a 2d occupancy grid map to eliminate the use of lidar to ...