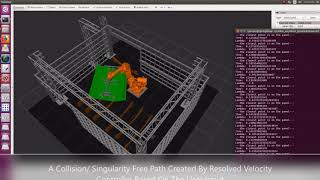
Media Summary: An overview of our 2021 IROS paper ( finding the optimal locations to ... Supplementary video of our work: RangedIK: An A path planner using operator inputs to generate a feasible path. The simulation is conducted using ROS Rviz.
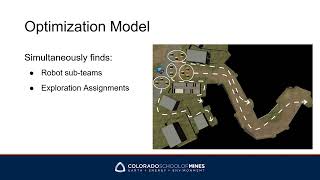
Optimization Based Robot Team Exploration - Detailed Analysis & Overview
An overview of our 2021 IROS paper ( finding the optimal locations to ... Supplementary video of our work: RangedIK: An A path planner using operator inputs to generate a feasible path. The simulation is conducted using ROS Rviz. This video addresses the problem of real-time planning and control of a The video demonstrates our algorithms for More information can be found in the following publications: D. Sun, Alexander Kleiner and C. Schindelhauer. 2010.
Siyuan Feng, X Xinjilefu, Christopher G. Atkeson and Joohyung Kim. Reconnaissance and Exploration with a autonomous Multi Robot Team