Media Summary: All robot has randomly initial positions and velocities. Followers will pursuit the leader such that the energy of the whole system is ... This is Calvin Hawkins's talk from the 2020 Conference on Decision and Instructor: Pieter Abbeel Course Website:
Optimization Based Formation Control - Detailed Analysis & Overview
All robot has randomly initial positions and velocities. Followers will pursuit the leader such that the energy of the whole system is ... This is Calvin Hawkins's talk from the 2020 Conference on Decision and Instructor: Pieter Abbeel Course Website: Position-based Formation Control Scheme - Agents parameters Experiment Formation Control via Passivity-Based Distributed Optimization and Estimation Consensus Video recording of lecture 6 of the summer course "
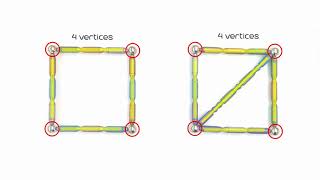
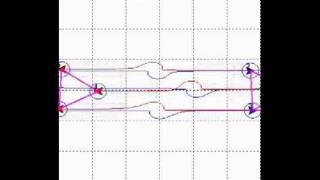
This is a flight test of four MAVs showing the effectiveness of consensus and MPC combined method. Autonomous robot swarm systems allow to address many inherent limitations of single robot systems, such as scalability and ... ... this formation from this one or this one from this one well let's see how the distance Prescribed Performance Distance Based Formation Control Swarm of robots is formed to a hexagon using an Adaptive Fuzzy Riccardo Falconi, Lorenzo Sabattini, Cristian Secchi, Cesare Fantuzzi, Claudio Melchiorri.