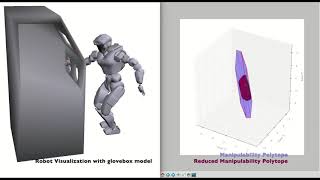
Media Summary: In this paper, we investigate the problem This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Evaluating Robot Manipulability in Constrained Environments by Velocity Polytope Reduction
On Maximizing Manipulability Index While - Detailed Analysis & Overview
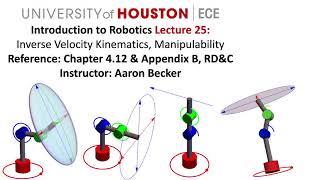
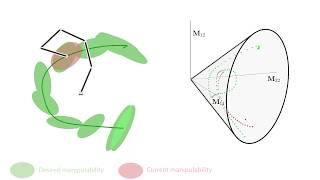
In this paper, we investigate the problem This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Evaluating Robot Manipulability in Constrained Environments by Velocity Polytope Reduction 机器人学52 manipulability analysis and classic optimization Lecture 25 finishes our exploration of inverse velocity on a serial robot manipulator. If there are more DOF than 6, the system is ... This video is related to the following preprint: Geometry-aware
As AI systems become increasingly agentic, retrieval is evolving from a fixed pipeline step into an active capability. Recorded live ... In this paper, we introduce DynaRetarget, a complete pipeline for retargeting human motions to humanoid control policies.