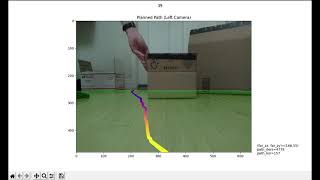
Media Summary: Massachusetts Institute of Technology, Fall 2014 16.622 Experimental Projects Lab II Senior Capstone RAANGER: ... Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ...
Obstacle Avoidance Using Single Camera - Detailed Analysis & Overview
Massachusetts Institute of Technology, Fall 2014 16.622 Experimental Projects Lab II Senior Capstone RAANGER: ... Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... The proposed system consists of a system concept to provide a smart electronic aid for blind people. We propose to design an ... Testing the smart features of the Skyrover X1 drone and pushing them to the max. Grab the X1 Get ... Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ...