Media Summary: In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... Obstacle Avoidance based on Depth Estimation and Object Detection 03 USENIX Security '22 - DoubleStar: Long-Range Attack Towards
Obstacle Avoidance Based On Depth - Detailed Analysis & Overview
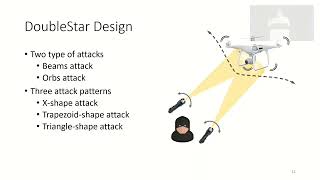
In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... Obstacle Avoidance based on Depth Estimation and Object Detection 03 USENIX Security '22 - DoubleStar: Long-Range Attack Towards Paper here: End-to-end navigation. Instead of directly predicting path label from images, we ... Obstacle Avoidance based on Depth Estimation and Object Detection 02 "In this paper we propose a goal oriented
Project Overview This video demonstrates an autonomous drone that performs rail-following using a YOLO- This short video details the methods and results from a model predictive control