Media Summary: This part of the lecture demonstrates the procedure of This lecture presents a general discussion on This lecture explains the concept of input-
Ncs 26c Full State Linearization - Detailed Analysis & Overview
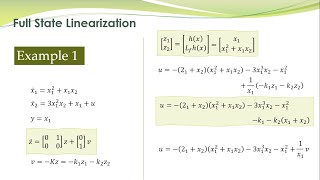
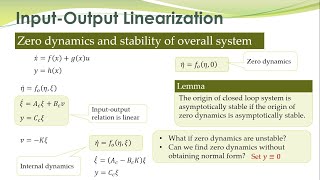
This part of the lecture demonstrates the procedure of This lecture presents a general discussion on This lecture explains the concept of input- This lecture talks about internal dynamics and stability of internal dynamics. To study the stability of internal dynamics, the concept ... This lecture describes how to obtain linear system of equations for a nonlinear system by This video describes how to analyze fully nonlinear differential equations by analyzing the
MIT RES.18-009 Learn Differential Equations: Up Close with Gilbert Strang and Cleve Moler, Fall 2015 View the This lecture presents two additional examples to elaborate the procedure for input-






![Linearizing Around a Fixed Point [Control Bootcamp]](https://i.ytimg.com/vi/1YMTkELi3tE/mqdefault.jpg)



