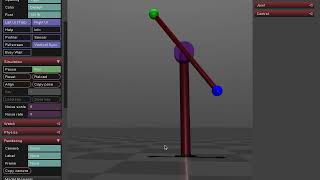
Media Summary: The rattleback is an ellipsoidal body whose inertia principal axes are tilted 20° relative to its geometric symmetry axes. Built-in visualisation of touch-grid sensor plugin values. See documentation for details: ... A free body rotating in space about its principal axis with
Mujoco Simulate Python Bindings Double - Detailed Analysis & Overview
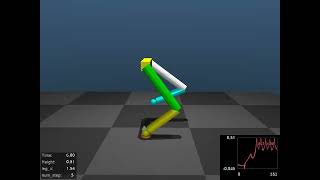
The rattleback is an ellipsoidal body whose inertia principal axes are tilted 20° relative to its geometric symmetry axes. Built-in visualisation of touch-grid sensor plugin values. See documentation for details: ... A free body rotating in space about its principal axis with For more details see publication [1] and full-length video [2]. [1] [2] ... Deep Deterministic Policy Gradient solving the OpenAI Gym