Media Summary: mujoco robot control by setting mocap_pos Presented at the IEEE International Conference on Will goes over how to create and simulate a
Mujoco Robot Control By Setting - Detailed Analysis & Overview
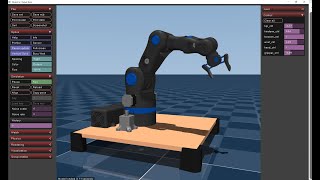
mujoco robot control by setting mocap_pos Presented at the IEEE International Conference on Will goes over how to create and simulate a Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is The video was created in a public tutorial colab notebook. Follow this link to try it yourself: ... This video showcases the simulation and analysis of the UR5e
In this video, I'll show how I used OpenAI Codex to