Media Summary: Running MPC control with Backman Path Planner Nonlinear Model Predictive Control for Real-Time Optimal Welcome to Part 1 of our series on Vehicle Model Predictive Control (
Mpc Path Tracking With Backman - Detailed Analysis & Overview
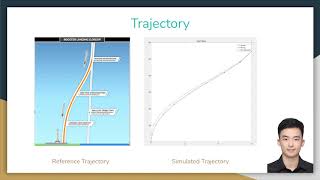
Running MPC control with Backman Path Planner Nonlinear Model Predictive Control for Real-Time Optimal Welcome to Part 1 of our series on Vehicle Model Predictive Control ( This project discusses a real-time implementation of a hierarchical model predictive control ( Master's Thesis in Ho Chi Minh City University of Technology Address: 268 Ly Thuong Kiet St., Dist.10, HCMC Email: ... Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing