Media Summary: Pick and place of an object avoiding the obstacles on the table using Used the OMPL plug-in within VREP to perform This video demonstrates tele-operation of dual-arm coordinated
Motion Planning On Baxter - Detailed Analysis & Overview
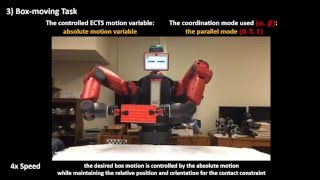
Pick and place of an object avoiding the obstacles on the table using Used the OMPL plug-in within VREP to perform This video demonstrates tele-operation of dual-arm coordinated 4 arms of dual arm manipulators, Yaskawa Motoman, and Rethink At ROSCON 2013, we integrated MoveIt! on the This video demonstrates the concept for the beginning of my research project, which overlaps with a replication of this work on ...
This is using gazebo2 and ros-indigo, the weird behavior is - Kinects are used to gather a complete Point Cloud of the workspace, and a CBiRRT is used to place