Media Summary: Baxter multi objects planning (Probabilistic Roadmap) Demonstration of an A* Probabilistic Roadmap for Path Planning This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...
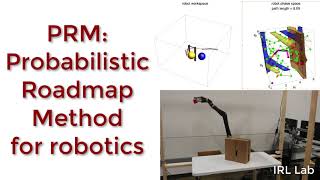
Apply Probabilistic Roadmap On Baxter - Detailed Analysis & Overview
Baxter multi objects planning (Probabilistic Roadmap) Demonstration of an A* Probabilistic Roadmap for Path Planning This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... A course project in UM ROB550. A downward-looking camera detects objects on the table (assuming static environment), and the ... Sorry for the lack of audio. I will explain a little bit of what is going on here. This was a robotics project to implement Motion ... This is the extra credit vedio for ECE 470 course, this vedio is edited and recorded by Yuqing Zhang. The topic is the