Media Summary: Sebastian Castro discusses technical concepts, practical tips, and software examples for An enduring goal of AI and robotics has been to build a robot capable of robustly performing a wide variety of tasks in a wide ... Abstract: Enabling robots to perform multi-stage forceful
Motion Force Planning For Manipulating - Detailed Analysis & Overview
Sebastian Castro discusses technical concepts, practical tips, and software examples for An enduring goal of AI and robotics has been to build a robot capable of robustly performing a wide variety of tasks in a wide ... Abstract: Enabling robots to perform multi-stage forceful Talk by Rachel Holladay in TAU CG seminar, November 10, 2021. Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Control-Aware Manipulation Planning under Changing External Forces
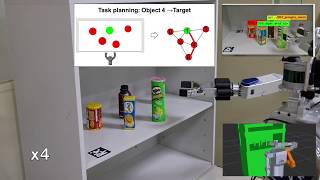
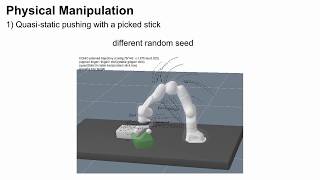
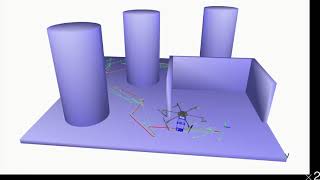
This video clip shows the physical robot experiment of our two ICRA'20 papers from iTAMP Lab at KIST. (Contact: ... This is a video supplement to the book "Modern Robotics: Mechanics, Marc Toussaint and Jung-Su Ha and Danny Driess Machine Learning & Robotics Lab, University Stuttgart Intelligent Systems Lab ...






![[2021] Tree Search-based Task and Motion Planning with Prehensile and Non-prehensile Manipulation](https://i.ytimg.com/vi/XblffqrPvmA/mqdefault.jpg)