Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.8 Authors: Tognon, Marco; Cataldi, Elisabetta; Tello Chávez, ... Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ...
Control Aware Motion Planning For - Detailed Analysis & Overview
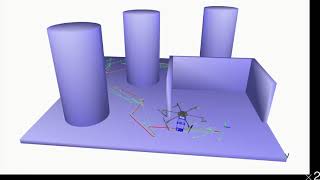
ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.8 Authors: Tognon, Marco; Cataldi, Elisabetta; Tello Chávez, ... Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... Motion Planning and Inertia Based Control Experiments - Impact Aware Manipulation Southwest Research Institute developed a robotics simulation package using Drake, a simulation tool for robotics. We also ... Video accompanying an ICRA2018/RAL paper which presents a new method to address the ...
We consider how algorithms allow for increasing system robustness, both in the sense of low-level feedback See the other videos in this series: This video ... Submitted to ICRA 2024: We present a novel algorithm for In this session, we will discuss various learnable Jitske de Vries, Elia Trevisan, Jules van der Toorn, Tuhin Das, Bruno Brito, Javier Alonso-Mora Regulations In IEEE Robotics and Automation Letters (RA-L) and IEEE/RSJ International Conference on Intelligent Robots and Systems ...