Media Summary: This is a video supplement to the book "Modern Robotics: Mechanics, In this video, I introduce two important concepts in robot See the other videos in this series: This video ...
Mod06lec31 Path Planning Graph Construction - Detailed Analysis & Overview
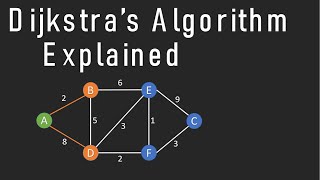
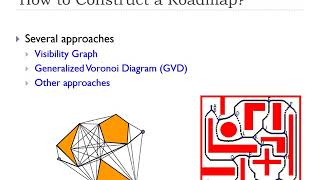
This is a video supplement to the book "Modern Robotics: Mechanics, In this video, I introduce two important concepts in robot See the other videos in this series: This video ... A* Algorithm and Potential Field methods, movement cost and heuristic cost, multipoint potential field methods. Need to get to your goal quickly? Ensure you Welcome to 'Introduction to Robotics' course ! Time to plan a route! This video explores fundamental
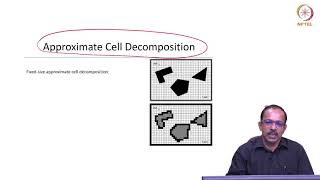
Path planning for RR robotic arm in configuration space using Cell Decomposition method Sorry you can not see the output on terminal. Let try on your computer and play any start and goal position you want to understand ...