Media Summary: Prepare for a technical interview by learning about the In IEEE International Conference on Robotics and Automation (ICRA) 2021 in Xi'an, China. Authors: Yuki Shirai, Xuan Lin, Ankur ... See the other videos in this series: This video ...
31 Planning Using Graph Search - Detailed Analysis & Overview
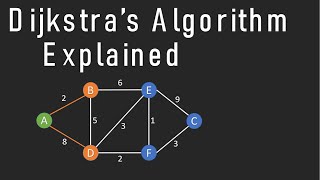
Prepare for a technical interview by learning about the In IEEE International Conference on Robotics and Automation (ICRA) 2021 in Xi'an, China. Authors: Yuki Shirai, Xuan Lin, Ankur ... See the other videos in this series: This video ... Week four of the University of Edinburgh's "Artificial Intelligence I explain Dijkstra's Shortest Path Algorithm