Media Summary: This video shows kinematic simulation of 2-link differentially-driven wheeled This is just a demonstration. Here my GitHub: ECE 5335/6325 State-Space Control Systems, University of Houston.
Mobile Robot Trajectory Tracking - Detailed Analysis & Overview
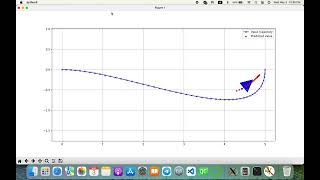
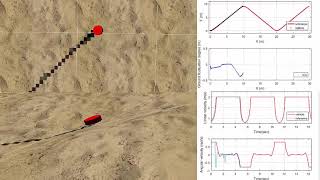
This video shows kinematic simulation of 2-link differentially-driven wheeled This is just a demonstration. Here my GitHub: ECE 5335/6325 State-Space Control Systems, University of Houston. Localization: Uses four ArUco markers as reference points and one marker on the Neural network and dynamic feedback linearization are used in the feedback error learning (FEL) structure for The proposed robust control strategy is based on an integral sliding–mode control approach and the attractive ellipsoid method.
Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... Experiments developed by Jesus Quiros (Instituto Politecnico Nacional), Luis T. Aguilar (Instituto Politecnico Nacional), Ulises ...