Media Summary: To navigation on the complex environment, the Deep Reinforcement Collision avoidance between mobile robot and human Mobile robot Collision Avoidance Learning TEST
Mobile Robot Collision Avoidance Learning - Detailed Analysis & Overview
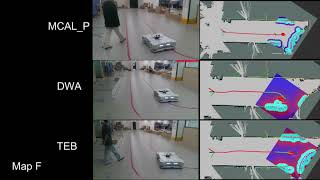
To navigation on the complex environment, the Deep Reinforcement Collision avoidance between mobile robot and human Mobile robot Collision Avoidance Learning TEST This video is a demonstration of the Potential fields method for Utilizing neural networks and reinforcement See what's new in the latest release of MATLAB and Simulink: Download a trial:
More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Implementation of image processing, object Visual obstacle avoidance systems of mobile robot This is a supplementary video for MSc thesis by Dongho Kang (supervised by David Hoeller and Dr. Jemin Hwangbo) at ... We propose a novel shared control strategy for