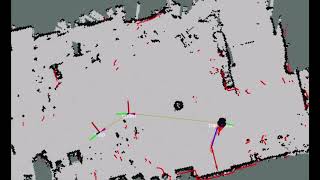
Media Summary: To navigation on the complex environment, the Deep Reinforcement Learning can be attractive method better than classical ... This video is a demonstration of the Potential fields method for Collision avoidance between mobile robot and human
Mobile Robot Collision Avoidance Based - Detailed Analysis & Overview
To navigation on the complex environment, the Deep Reinforcement Learning can be attractive method better than classical ... This video is a demonstration of the Potential fields method for Collision avoidance between mobile robot and human Utilizing neural networks and reinforcement learning algorithms, Deep Reinforcement Learning (DRL) has become increasingly ... See what's new in the latest release of MATLAB and Simulink: Download a trial: Implementation of image processing, object detection and control algorithms on our
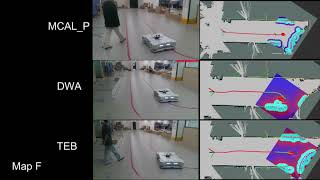
Mobile robot Collision Avoidance Learning TEST More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Experiment scenario 3: The multisensor EKF and the NMPC controller were then activated together. Starting from $(0,0,0)$, the ... Visual obstacle avoidance systems of mobile robot