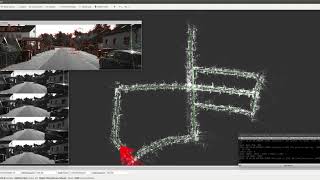
Media Summary: DEMO for ITS "Object SLAM with Robust Quadric Initialization and This paper deals with the task of ego-vehicle S-PTAM is a Stereo SLAM system able to compute the camera trajectory in real-time. It heavily exploits the parallel nature of the ...
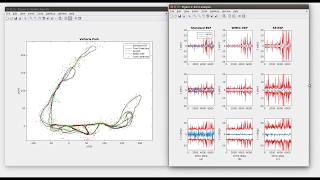
Map Based Visual Localization Kitti - Detailed Analysis & Overview
DEMO for ITS "Object SLAM with Robust Quadric Initialization and This paper deals with the task of ego-vehicle S-PTAM is a Stereo SLAM system able to compute the camera trajectory in real-time. It heavily exploits the parallel nature of the ...