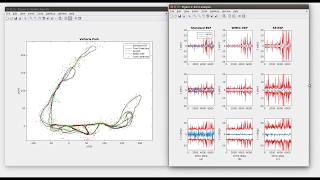
Media Summary: Yulin Yang, yuyang.edu 1) We add attacks to the victoria datasets and then use 3 kind of filters to do the Reliably assessing the error in an estimated vehicle position is integral for ensuring the vehicle's safety in urban environments. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.5 Authors: Porav, Horia; Maddern, Will; Newman, Paul Title: ...
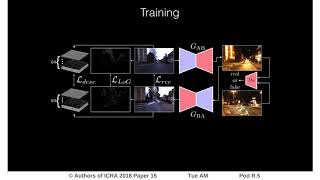
Map Based Localization Under Adversarial - Detailed Analysis & Overview
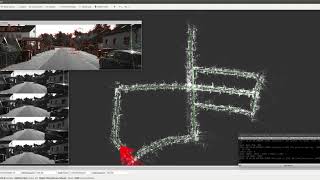
Yulin Yang, yuyang.edu 1) We add attacks to the victoria datasets and then use 3 kind of filters to do the Reliably assessing the error in an estimated vehicle position is integral for ensuring the vehicle's safety in urban environments. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.5 Authors: Porav, Horia; Maddern, Will; Newman, Paul Title: ... Accompanying video for our IEEE Sensors Letter submission tilted on "Performance Evaluation on NDT LiDAR normal distribution transform (NDT) scan matching error induces when occlusion presents. It is found that Adversarial attack on Cross View Geo-Localization
Organizers: Torsten Sattler; Akihiko Torii; Alex Kendall; Giorgos Tolias Description: Place recognition and image-