Media Summary: Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior In this letter, we develop a low-cost stereo Authors: Zoe Landgraf, Fabian Falck, Michael Bloesch, Stefan Leutenegger, Andrew J. Davison Dyson Robotics Lab, Imperial ...
Map Based Visual Inertial Localization - Detailed Analysis & Overview
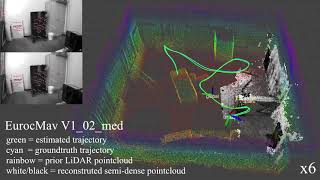
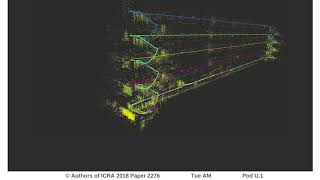
Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior In this letter, we develop a low-cost stereo Authors: Zoe Landgraf, Fabian Falck, Michael Bloesch, Stefan Leutenegger, Andrew J. Davison Dyson Robotics Lab, Imperial ... This video demonstrates how to use video data to measure the position of a drone without GNSS. Reliably assessing the error in an estimated vehicle position is integral for ensuring the vehicle's safety in urban environments. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.1 Authors: Schneider, Thomas; Dymczyk, Marcin Tomasz; Fehr, ...
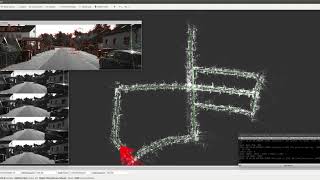
This paper presents a novel tightly-coupled monocular Sachini Herath, David Caruso, Chen Liu, Yufan Chen, and Yasutaka Furukawa "Neural Visual-inertial Localization in 3D point cloud map