Media Summary: This video shows the results of our paper titled "Scalable lazy SMT-based This video shows the simulation results of the proposed approach at IV 2022: "Rule-Compliant Trajectory Repairing We will see how SMT solver implements the algorithm CDCL(T), which in turn solves Quantifier Free Proportional Formulas.
Ltl Motion Planning Using Satisfiability - Detailed Analysis & Overview
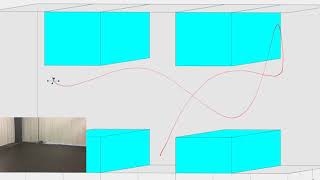
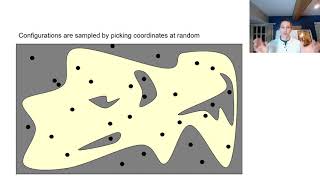
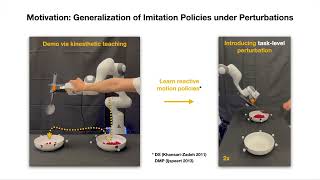
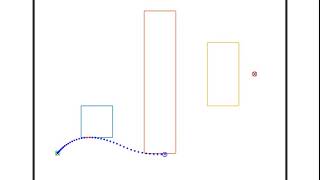
This video shows the results of our paper titled "Scalable lazy SMT-based This video shows the simulation results of the proposed approach at IV 2022: "Rule-Compliant Trajectory Repairing We will see how SMT solver implements the algorithm CDCL(T), which in turn solves Quantifier Free Proportional Formulas. For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ... Learning from demonstration (LfD) has succeeded in tasks featuring a long time horizon. However, when the problem complexity ... The video shows a simple example of a time minimal trajectory subject to linear temporal logic (
This video shows the results of our paper titled "DoS-Resilient Multi-Robot Temporal Logic This video shows the results of our paper titled "Linear temporal logic A Human-In-the-Loop, Linear Temporal Logic This video is part of an online course, Intro to Theoretical Computer Science. Check out the course here: ...