Media Summary: Part of A Heterogeneous Swarm Solution for Disaster Recon: A Feasibility Study. Hardware: i7-6700k , GPU : Nvidia GTX 1080 OS: Ubuntu 14.04 Source code come from: ... I don't write or own the code. This was just a
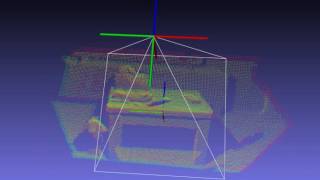
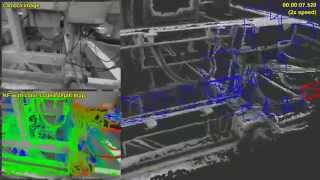
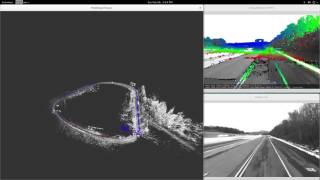
Lsd Slam Test - Detailed Analysis & Overview
Part of A Heterogeneous Swarm Solution for Disaster Recon: A Feasibility Study. Hardware: i7-6700k , GPU : Nvidia GTX 1080 OS: Ubuntu 14.04 Source code come from: ... I don't write or own the code. This was just a Open-Source Code Available! see Publication: AR. Drone 2.0 doing fully autonomous navigation and exploration in an unknown environment. 3D mapping and localisation is ... Evaluation of Large Scale Direct (Monocular)