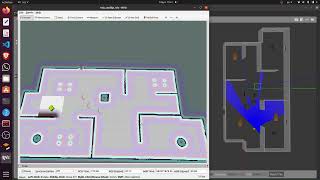
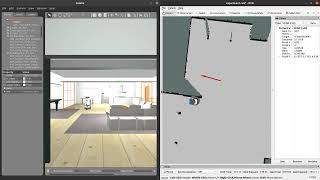
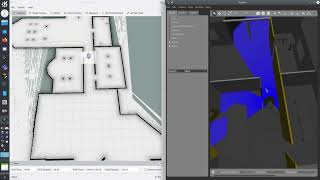
Media Summary: So from the basic diff drive robot running with teleop, where I manually controlled it to APF implementation for obstacle avoidance, ... Data and launch files: Note: Replaying rosbag files with 2x speed. This video is part of the project "Object Binning and obstacle avoidance using SLAM in Gazebo. -
Localization Move Base Amcl Gmapping - Detailed Analysis & Overview
So from the basic diff drive robot running with teleop, where I manually controlled it to APF implementation for obstacle avoidance, ... Data and launch files: Note: Replaying rosbag files with 2x speed. This video is part of the project "Object Binning and obstacle avoidance using SLAM in Gazebo. - Map created with Cartographer. Non default parameters (can be seen at the end of the video) First upload: 2018-08-30. This is my thesis output. Implementation of Adaptive Monte Carlo Algorithm for This video demonstrates the Flexible Navigation system ( which uses the ...
Welcome to our YouTube video about Autonomous Mobile Robots using ROS with