Media Summary: This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... Published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Part of the IROS2022 Best ... Video abstract for paper published in NAVIGATION: Journal of the Institute of Navigation, Volume 69 Number 1. For full paper, or ...
Learning Methods For Robust Localization - Detailed Analysis & Overview
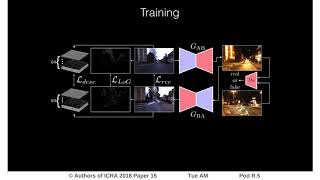
This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... Published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Part of the IROS2022 Best ... Video abstract for paper published in NAVIGATION: Journal of the Institute of Navigation, Volume 69 Number 1. For full paper, or ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.5 Authors: Porav, Horia; Maddern, Will; Newman, Paul Title: ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod F.8 Authors: Valada, Abhinav; Radwan, Noha; Burgard, Wolfram Title: ... Paper link: This paper addresses the problem of active collaborative
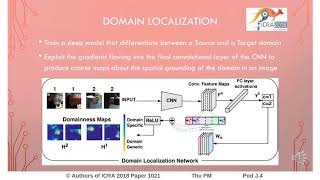
This video belongs to our paper submitted to IEEE 22nd International Conference on Information Fusion 2019 in Ottawa, Canada: ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.4 Authors: Angeletti, Gabriele; Caputo, Barbara; Tommasi, Tatiana ... A 3-minute spotlight video for our ICRA'18 paper entitled "Bayesian Viewpoint-Dependent