Media Summary: [RAL 2025] I2D-LocX: An Efficient, Precise and Robust Method for Camera Localization in LiDAR Maps Published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Part of the IROS2022 Best ... This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ...
High Precision And Robust Localization - Detailed Analysis & Overview
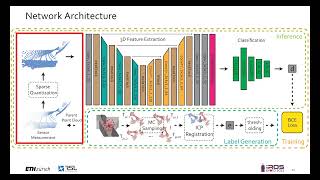
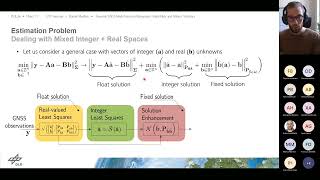
[RAL 2025] I2D-LocX: An Efficient, Precise and Robust Method for Camera Localization in LiDAR Maps Published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Part of the IROS2022 Best ... This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... To be published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022 Learning-based ... Daniel Medina (Institute of Communications and Navigation, German Aerospace Center (DLR)) More info ... Terrain-aided navigation, which combines radar altitude with a digital terrain map (DTM), was developed before the era of the ...
Overcoming the perceptual limitations of hu-manoid robots requires representations exploitable by highly integrable simulation, ... This video is the supplementary material to our paper "ESO-Based



![[RAL 2025] I2D-LocX: An Efficient, Precise and Robust Method for Camera Localization in LiDAR Maps](https://i.ytimg.com/vi/P7yZI9Q4RVg/mqdefault.jpg)