Media Summary: Telluride Neuromorphic Workshop tutorial For Model This lecture provides an overview of model Intoduction to Robotics Lecture-12 p.28 - Pure Pursuit
Learning Based Predictive Path Following - Detailed Analysis & Overview
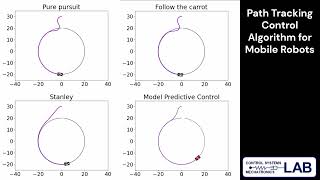
Telluride Neuromorphic Workshop tutorial For Model This lecture provides an overview of model Intoduction to Robotics Lecture-12 p.28 - Pure Pursuit This is just a simulation of mobile robot with 4 mecanum wheels. General setup: a KUKA Light-weight Robot IV is controlled by an external PC via Ethernet. The constrained Presentation by Manuel C.R.M. Fernandes, University of Porto, during the mini-symposium "Airborne Wind Energy" at the Wind ...