Media Summary: The video visualizes the results of our paper " Presentation of our paper "Renaissance Robot: In this paper, we tackle the problem of flying a quadrotor using
Iros 2022 Learning Time Optimized - Detailed Analysis & Overview
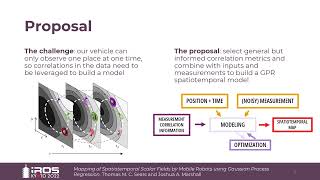
The video visualizes the results of our paper " Presentation of our paper "Renaissance Robot: In this paper, we tackle the problem of flying a quadrotor using Jenkins! You have too much coffee in your mug!” The general expression to say there is nothing worse than spilling coffee/hot ... How can a single mobile robot understand a dynamic environment? In this presentation by PhD candidate Thomas Sears, ... "Fast Manipulability Maximization Using Continuous-
Robotic manipulation of cloth is a challenging task due to the high dimensionality of the configuration space and the complexity of ... Video presentation for the paper "IKFlow: Generating Diverse Inverse Kinematics Solutions"
![[IROS 2022] Learning Time-optimized Path Tracking with or without Sensory Feedback - Presentation](https://i.ytimg.com/vi/hBukfMs6We8/mqdefault.jpg)
![[IROS 2022] Learning Time-optimized Path Tracking with or without Sensory Feedback](https://i.ytimg.com/vi/gCPN8mqPVHg/mqdefault.jpg)
![[IROS 2022] Renaissance Robot: Optimal Transport Policy Fusion for Learning Diverse Skills](https://i.ytimg.com/vi/WwkxNGcRRJ0/mqdefault.jpg)



![[IROS 2022] Robust Counterexample-guided Optimization from Differentiable Temporal Logic](https://i.ytimg.com/vi/mx4_hYFO_K0/mqdefault.jpg)