Media Summary: This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Link: This video present the work for the paper Planning Maximum- In this paper, we investigate the problem of
Fast Manipulability Maximization Using Continuous - Detailed Analysis & Overview
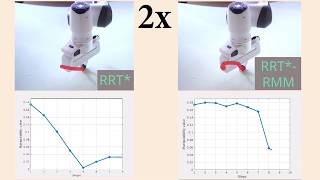
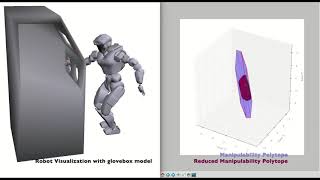
This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Link: This video present the work for the paper Planning Maximum- In this paper, we investigate the problem of Evaluating Robot Manipulability in Constrained Environments by Velocity Polytope Reduction 机器人学52 manipulability analysis and classic optimization Authors: Ilka Banfield and Humberto Rodriguez Presenter: Humberto Rodriguez Off-line analysis of path tracking of functionally ...
Recorded 03 October 2023. Kianna Wan of Stanford University presents "