Media Summary: Inter-agent collision avoidance using linear MPC Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi- Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full)
Inter Agent Collision Avoidance Using - Detailed Analysis & Overview
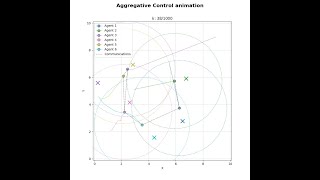
Inter-agent collision avoidance using linear MPC Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi- Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Animation of Aggregative Optimization for Multi-agent systems with collision avoidance Collision avoidance multi-agents from Failure to Success 7.71s animation of Aggregative Optimization for Multi-agent Systems without collision avoidance
Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) Theta* for geometric path planning. ORCA for path following