Media Summary: Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.3 Authors: Long, Pinxin; Fan, Tingxiang; Liu, Wenxi; Pan, Jia; ...
Deep Learned Collision Avoidance Policy - Detailed Analysis & Overview
Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.3 Authors: Long, Pinxin; Fan, Tingxiang; Liu, Wenxi; Pan, Jia; ... Accepted for presentation at ICRA 2018. Paper: Project: This video describes the experiments and results in the paper at ... This is a supplementary video for MSc thesis by Dongho Kang (supervised by David Hoeller and Dr. Jemin Hwangbo) at ...
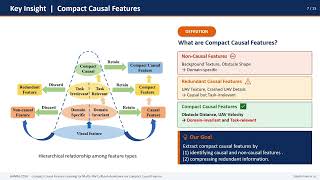
Learning Robust Policy for Multi UAV Collision Avoidance via Compact Causal Feature(AAMAS 2026)