Media Summary: more info: This is the presentation of our paper ( C. This video presents a distributed comprehensive framework enabling a networked multi-robot system to serve time-varying ... This video presents the capabilities of our simulation model, which contains a Multi-Agent
Integrated Task Allocation And Path - Detailed Analysis & Overview
more info: This is the presentation of our paper ( C. This video presents a distributed comprehensive framework enabling a networked multi-robot system to serve time-varying ... This video presents the capabilities of our simulation model, which contains a Multi-Agent See the other videos in this series: This video ... This video presents a learning framework to estimate agent capabilities and task requirements for multi-robot Stage mobile simulator is used here to show robots (black),
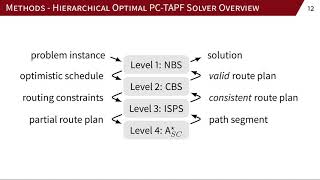
This video describes a novel hierarchical algorithm for solving Precedence-Constrained Multi Agent Corobot robot has to visit perform a navigation Finding shortest path and task allocation with multi-robot system This is the HUMANOIDS presentation video of our Tuesday Session D2, September 16, 2014 Chicago, Illinois, USA The complete guide to videos from the 2014 IEEE/RSJ ...