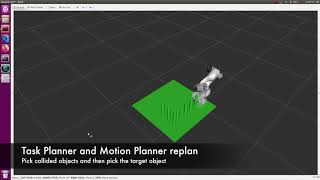
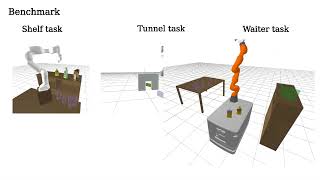
Media Summary: This is the HUMANOIDS presentation video of our work: Dominik Urbaniak, Alejandro Agostini, and Dongheui Lee (2021). An enduring goal of AI and robotics has been to build a robot capable of robustly performing a wide variety of tasks in a wide ... This scenario replicates the experiment by Havur et al. on rearrangement
Combining Task And Motion Planning - Detailed Analysis & Overview
This is the HUMANOIDS presentation video of our work: Dominik Urbaniak, Alejandro Agostini, and Dongheui Lee (2021). An enduring goal of AI and robotics has been to build a robot capable of robustly performing a wide variety of tasks in a wide ... This scenario replicates the experiment by Havur et al. on rearrangement This video shows a demonstration of a general This work aims at leveraging instructional video to guide the solving of complex multi-contact This scenario requires the capacity to generalize from particular failures, i.e., after detecting an inconsistent configuration with two ...