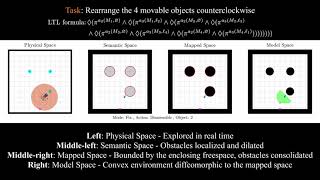
Media Summary: Master thesis developed at the Distributed Hybrid Systems Group by Gianmarco Fedeli. Abstract: The thesis investigates the ... Reactive task planning for multi-robot systems in partial known environment - Experiment 1.1 Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ...
Human Aware Reactive Task Planning - Detailed Analysis & Overview
Master thesis developed at the Distributed Hybrid Systems Group by Gianmarco Fedeli. Abstract: The thesis investigates the ... Reactive task planning for multi-robot systems in partial known environment - Experiment 1.1 Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... Reactive task planning for multi-robot systems in partial known environment - Experiment 2.1 Conference: Humanoids 2020 Paper link: ... Reactive task planning for multi-robot systems in partial known environment - Experiment 1.2
Authors: G. Buisan, G. Sarthou, R. Alami Link: Abstract: This paper addresses the ... Il metodo che presentiamo qui riguarda appunto l'integrazione di tasche motion 2021 International Conference on Robotics and Automation (ICRA 2021) Authors: Vasileios Vasilopoulos*, Yiannis Kantaros*, ...