Media Summary: Master thesis developed at the Distributed Hybrid Systems Group by Gianmarco Fedeli. Abstract: The thesis investigates the ... Reactive task planning for multi-robot systems in partial known environment - Experiment 1.1 Reactive task planning for multi-robot systems in partial known environment - Experiment 1.2
Reactive Task Planning For Multi - Detailed Analysis & Overview
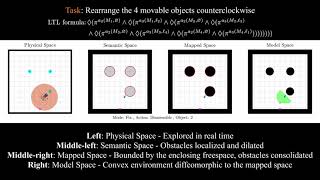
Master thesis developed at the Distributed Hybrid Systems Group by Gianmarco Fedeli. Abstract: The thesis investigates the ... Reactive task planning for multi-robot systems in partial known environment - Experiment 1.1 Reactive task planning for multi-robot systems in partial known environment - Experiment 1.2 Sequences of interdependent geometric constraints are central to many Reactive task planning for multi-robot systems in partial known environment - Experiment 2.1 Reactive task planning for multi-robot systems in partial known environment - Experiment 3.1
Reactive task planning for multi-robot systems in partial known environment - Experiment 2.2 ROBOTOKAUST KAUST Research Conference on Robotics and Autonomy 2021 ... This article introduces a novel collaborative optimal motion 2021 International Conference on Robotics and Automation (ICRA 2021) Authors: Vasileios Vasilopoulos*, Yiannis Kantaros*, ... ABSTRACT: Robots are increasingly an important part of our world, from working in factories and hospitals to driving on city ...