Media Summary: In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator ... High-Speed Navigation in Unknown Environments using Learned Probabilities of Collision 7-min presentation video for the paper "VI-IKD:
High Speed Navigation Using The - Detailed Analysis & Overview
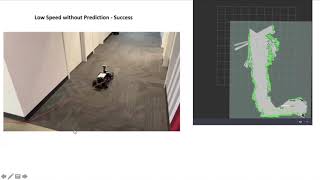
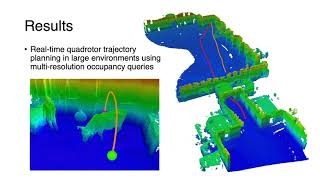
In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator ... High-Speed Navigation in Unknown Environments using Learned Probabilities of Collision 7-min presentation video for the paper "VI-IKD: This video accompanies our paper, Safety-Assured Quadrotors are agile. Unlike most other machines, they can traverse extremely complex environments at Sikang Liu, Michael Watterson, Sarah Tang, and Vijay Kumar.
(Mid-Stage PhD) Nils Funk is conducting research that focuses on efficient Bayesian Learning for Safe High-Speed Navigation in Unknown Environments