Media Summary: High Speed Robot Navigation using Predicted Occupancy Maps Final Footage from our experiments from the IROS 2023 paper "From Crowd Motion Abstract: This work addresses the development of a nonlinear model
High Speed Navigation Using Predictive - Detailed Analysis & Overview
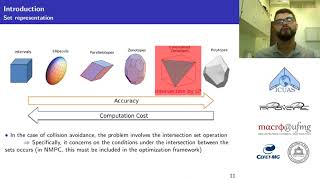
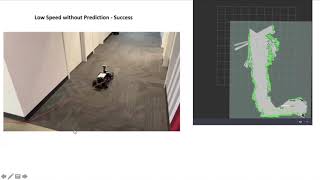
High Speed Robot Navigation using Predicted Occupancy Maps Final Footage from our experiments from the IROS 2023 paper "From Crowd Motion Abstract: This work addresses the development of a nonlinear model High-Speed Navigation in Unknown Environments using Learned Probabilities of Collision We present HIP -- a method for combining geometric and learning-based ( In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator ...
This research addresses the optimization of autonomous driving on curved paths, a critical area where current systems exhibit ... Video demo for the MED'18 conference publication. This video accompanies the paper "Strategizing at


![From Crowd Motion Prediction to Robot Navigation in Crowds [IROS 2023]](https://i.ytimg.com/vi/mzFiXg8KsZ0/mqdefault.jpg)