Media Summary: Hierarchical Adaptive Control for Collaborative Manipulation of a Rigid Object by Quadrupedal Robots ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.1 Authors: Culbertson, Preston; Schwager, Mac Title: Decentralized ... Quan Nguyen Assistant Professor of Aerospace, Mechanical Engineering & Computer Science University of Southern California ...
Hierarchical Adaptive Control For Collaborative - Detailed Analysis & Overview
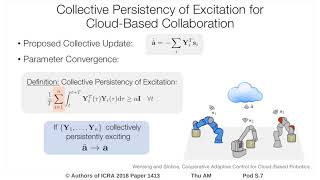
Hierarchical Adaptive Control for Collaborative Manipulation of a Rigid Object by Quadrupedal Robots ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.1 Authors: Culbertson, Preston; Schwager, Mac Title: Decentralized ... Quan Nguyen Assistant Professor of Aerospace, Mechanical Engineering & Computer Science University of Southern California ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod S.7 Authors: Wensing, Patrick; Slotine, Jean-Jacques E. Title: ... Hierarchical Adaptive Control with e-pucks Recent studies on quadruped robots have focused on either locomotion or mobile manipulation using a robotic arm. Legged ...
Journal: Robotics and Computer-Integrated Manufacturing (RCIM) Paper link: This ... This video is a presentation given by our recent graduate student, Wayne(MoWei) Hsu, from the University of Toronto, Institute for ...







![[SMC 2020] Hierarchical Needs Based Self-Adaptive Framework For Cooperative Multi-Robot System](https://i.ytimg.com/vi/G2EdBd0plIU/mqdefault.jpg)



