Media Summary: Experimental demonstration of following article: Reference: M. Park, and *H. Oh. Cooperative information-driven This video is a flight test result from a study on intelligence cooperative system of A Low-cost Relative Positioning Method for
Heterogeneous Multi Ugv Source Term - Detailed Analysis & Overview
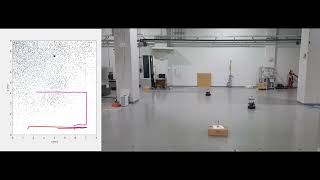
Experimental demonstration of following article: Reference: M. Park, and *H. Oh. Cooperative information-driven This video is a flight test result from a study on intelligence cooperative system of A Low-cost Relative Positioning Method for Heterogeneous Coalition Formation and Scheduling with Multi-Skilled Robots - AshayAswale (IROS 2023) Indoor source term estimation experiment using multiple UGVs Special thanks to Santiago Cota for participating as the leader in the demonstration.
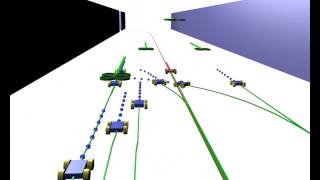
This video presents a stochastic programming framework for The video shows ability of the RHC-based formation control to avoid collisions. In this video, one of the This video is of a bi-directional cooperative obstacle avoidance technique of a








![[ICCAS2024] Multi-UGV Task Reallocation for Sensor and Actuator Faults](https://i.ytimg.com/vi/K4eeqDsTnFU/mqdefault.jpg)
