Media Summary: Testing of steering behaviours implementation using data components and processor in Unity 5. The path following and the ... The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, path plan, perform a mission ... Welcome to Epic Flight Academy's Maneuvers Series. In this series, we are focusing on specific maneuvers pilots must be able to ...
Group Formation And Collision Avoidance - Detailed Analysis & Overview
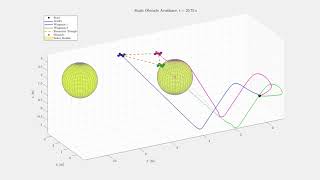
Testing of steering behaviours implementation using data components and processor in Unity 5. The path following and the ... The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, path plan, perform a mission ... Welcome to Epic Flight Academy's Maneuvers Series. In this series, we are focusing on specific maneuvers pilots must be able to ... In this episode of Mike Meyers' Network+ Certification video training, Mike describes the basic mechanism in Ethernet networks ... Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi-agent Systems Guo, M., & Zavlanos, M. M. (2018). A leader UAV (blue) and two wingman UAVs (pink and green) are in a
This video demonstrates the real-time robot path planning in action for dynamic MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation This work is submitted under the title "Communication-Efficient




![CompTIA Network+ Certification [License to Tech] Ep 015: Collision Avoidance and Detection](https://i.ytimg.com/vi/jESI4bzsVnY/mqdefault.jpg)