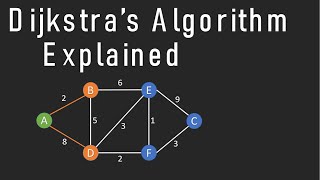
Media Summary: Graph-based Path Planning Question using Grassfire and Dijkstra's Algorithm See the other videos in this series: This video ... This work presents a new strategy for autonomous
Graph Based Path Planning Question - Detailed Analysis & Overview
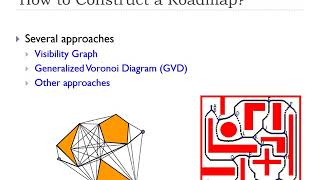
Graph-based Path Planning Question using Grassfire and Dijkstra's Algorithm See the other videos in this series: This video ... This work presents a new strategy for autonomous Hello friends so today we'll be discussing about visibility In this video, I introduce two important concepts in robot Hello guys welcome back again to my YouTube channel in this video I will share another
... a weight which is the distance and then just use the shortest path in a In this work we present new results on autonomous exploration and mapping of underground mines using aerial robots. A flying ... In this work we provide a novel motion planning