Media Summary: In this video, I introduce the concept of Did you know that everything is moving? Even you, as you're sitting perfectly still, because the earth is moving, and the sun, and ... This physics video tutorial provides a basic introduction into reference
Finding Relative Pose Between Frames - Detailed Analysis & Overview
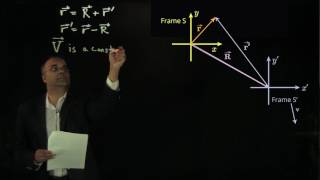
In this video, I introduce the concept of Did you know that everything is moving? Even you, as you're sitting perfectly still, because the earth is moving, and the sun, and ... This physics video tutorial provides a basic introduction into reference MIT 8.01 Classical Mechanics, Fall 2016 View the complete course: Instructor: Prof. Deepto ... Courses on Khan Academy are always 100% free. Start practicing—and saving your progress—now: ... We use pose transformation matrices to represent
Authors: Yaqing Ding, Jian Yang, Jean Ponce, Hui Kong Description: We propose minimal solutions to Estimating Relative Pose and Aligning of a cylinder model using ICP MIT 8.01 Classical Mechanics, Fall 2016 View the complete course: Instructor: Dr. Peter Dourmashkin ... We discuss coordinate transformations in light of robotics and their three main types: 1. Pure Rotation 2. Pure Translation 3. This physics video tutorial explains how to solve