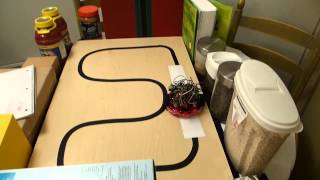
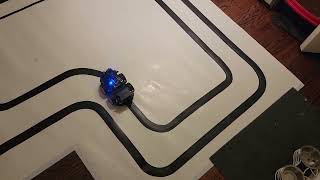
Media Summary: Ryerson University. Robotics and Embedded System. Participant is tasked with the creation of a unique and quirky creature, Alphi. Alphi is smart enough to avoid hitting objects. CKRE 120 Assignment 5 Line Follow and Change Lane
Final Assignment Ckre 120 - Detailed Analysis & Overview
Ryerson University. Robotics and Embedded System. Participant is tasked with the creation of a unique and quirky creature, Alphi. Alphi is smart enough to avoid hitting objects. CKRE 120 Assignment 5 Line Follow and Change Lane Notes on the shift register, I believe it is hardware limitations and maybe 5V is not enough power. The shift register worked fine ... My partner and I had to create the turn signal system for an automobile in Xilinx and then simulate it on an FPGA.