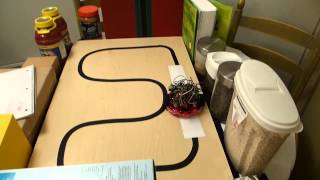
Media Summary: Ryerson University. Robotics and Embedded System. Participant is tasked with the creation of a unique and quirky creature, Alphi. Alphi is smart enough to This video shows the result of the Lab - Edge sensing done during the course CKRE120 (Programming Robotics Systems, ...
Ckre 120 Lab3 Object Avoidance - Detailed Analysis & Overview
Ryerson University. Robotics and Embedded System. Participant is tasked with the creation of a unique and quirky creature, Alphi. Alphi is smart enough to This video shows the result of the Lab - Edge sensing done during the course CKRE120 (Programming Robotics Systems, ...