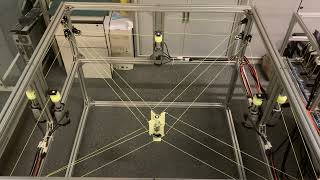
Media Summary: Fast cable driven pick and place parallel robot SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. This video showes the preliminary test results of the TBot
Fast Cable Driven Pick And - Detailed Analysis & Overview
Fast cable driven pick and place parallel robot SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. This video showes the preliminary test results of the TBot This is the first time I've combined the gripper and gantry into one unit, moved it somewhere and This is the second prototype of the project RopeBot. The main control loop is implemented in C++ and runs on a Raspberry Pi 3B. Cable-Driven Parallel Robotics, a new solution for the Industry
Picking up and Placing Demo with cable-driven robot The objectif of project FASTKIT is to a provide a experiments aims at providing a low cost and versatile robotic solution for logistics ... Pickable is based on the same principles as industrial parallel robots to manipulate and place objects at Subscribe to our thematic channels: NoComment: Euronews ... Time-optimal trajectory scaling of a laboratory-developed cable-driven parallel robot