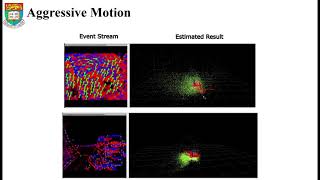
Media Summary: Upper left (Features Tracked) - Upper right (Intensity image not used) Bottom: 3D pose and features Alex Zihao Zhu, Nikolay ...
Evo Event Based Visual Odometry - Detailed Analysis & Overview
Upper left (Features Tracked) - Upper right (Intensity image not used) Bottom: 3D pose and features Alex Zihao Zhu, Nikolay ...