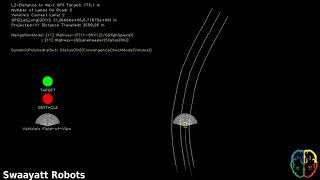
Media Summary: IEEE Latin America Transactions Authors: Armando Alves Neto, Victor C. da S. The proposed system is a low-cost autonomous robotic vehicle that detects obstacles and navigates safely without human control. Cyborg insects refer to hybrid robots that integrate living insects with miniature electronic controllers to enable robotic-like ...
Energy Efficient Navigation In Unknown - Detailed Analysis & Overview
IEEE Latin America Transactions Authors: Armando Alves Neto, Victor C. da S. The proposed system is a low-cost autonomous robotic vehicle that detects obstacles and navigates safely without human control. Cyborg insects refer to hybrid robots that integrate living insects with miniature electronic controllers to enable robotic-like ... This presentation addresses Traffic Engineering (TE) mechanisms that support È. Pairet, J. D. Hernández, M. Carreras, Y. Petillot, and M. Lahijanian. "Online Mapping and Motion Planning under Uncertainty for ... We propose a diffusion approximation method to the continuous-state Markov Decision Processes (MDPs) that can be utilized to ...
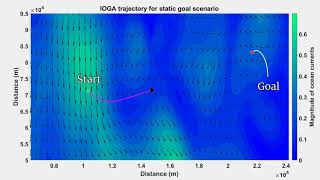
We consider the problem of trajectory design in an online fashion, under time-varying environments. To this end, we formulate the ... A Reinforcement Learning and Convex Optimization based motion planning algorithm is being demoed for cruise mode ... ICUAS 2021 Abstract: This work proposes a single-layer finite-horizon optimal control strategy to solve the autonomous Mar Reguant is an Associate Professor of Economics at Northwestern University and was a Wednesday @ NICO Speaker in 2016 ...