Media Summary: Presentation by Sergey Levine on robotic foundation models for visual Pre-trained large language models (LLMs) have demonstrated strong common-sense reasoning abilities, making them promising ... This talk was presented at the ICRA21 Workshop on Visual-Inertial
Ving Learning Open World Navigation - Detailed Analysis & Overview
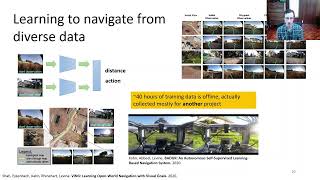
Presentation by Sergey Levine on robotic foundation models for visual Pre-trained large language models (LLMs) have demonstrated strong common-sense reasoning abilities, making them promising ... This talk was presented at the ICRA21 Workshop on Visual-Inertial Monica Pina developed the depicted algorithm based in DDPG, a Reinforcement Gregory Kahn, Pieter Abbeel, Sergey Levine Berkeley AI Research (BAIR), University of California, Berkeley Paper: ...